|
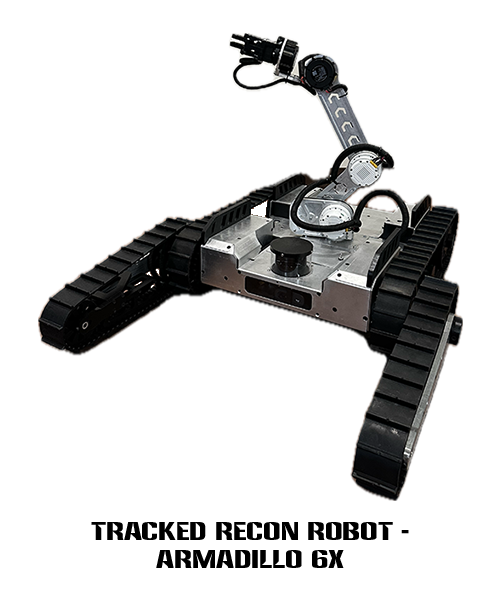
The Armadillo 6X is a rugged tracked reconnaissance robot designed for challenging environments and complex manipulation tasks. With its innovative flipper system, 6-DOF arm, and advanced sensing capabilities, it excels in search-and-rescue, inspection, and tactical operations.
Physical Specifications
Dimensions:
- Length: 65 cm (tracks retracted)
- Width: 72 cm
- Height: 24 cm (body only)
Weight: 35 kg (including battery)
Construction Material:
- Frame: 6061-T6 aluminum alloy
- Track Components: Hardened steel
- Cover Plates: Impact-resistant composite
Track System
Main Tracks:
- Length: 65 cm
- Width: 7 cm
- Material: High-durability rubber compound
- Tread Pattern: Deep-lugged for maximum traction
- Drive: Direct-drive brushless motors
Flipper Mechanisms:
- Length: 48 cm
- Independent control for each flipper
- 180-degree rotation capability
- Powered by high-torque servo motors
Performance:
- Maximum Speed: 2 m/s on flat terrain
- Climbing Ability: 40 degree slopes
- Step Climbing: Up to 30 cm
- Gap Crossing: Up to 50 cm
Robotic Arm
Configuration: 6-DOF arm with central mounting
Specifications:
- Maximum Reach: 65 cm
- Payload Capacity: 3 kg at full extension
- Rotation Base: 360° continuous rotation
Joint Properties:
- Direct Drive
- Position feedback with encoders
- Current sensing for force estimation
End-Effector Options:
- Standard parallel gripper (0-35 mm)
- Two-finger adaptive gripper
- Quick-change tool mount
- Specialized attachments available
Sensor Suite
Visual Systems:
- Main Navigation Camera:
- Diagonal field of view (dFoV): 78°
- Max Resolution: 1080p/30 fps - 720p/ 30fps
- Arm-Mounted Camera:
- Diagonal field of view (dFoV): 78°
- Max Resolution: 1080p/30 fps - 720p/ 30fps
- LIDAR System:
- 360°x90° scanning LIDAR
- Range: 0.05-30 meters
- Resolution: ±2.0 cm
- Update Rate: 250 Hz
- Additional Sensors:
- 9DOF IMU
- Track tension sensors
- Motor current monitoring
- Tilt sensor
- GPS module (optional)
Computing and Control
Main Computer:
- NVIDIA Jetson Orin Nano
- 16GB RAM
- 512GB SSD
Motor Controllers:
- Distributed control architecture
- Real-time feedback control
- 1kHz update rate
Operating System:
- ROS 2 middleware
- Open Arhitecture control software
Autonomous Capabilities
Navigation:
- Autonomous path planning
- Obstacle avoidance
- Self-righting behavior
- Terrain adaptation
Mission Planning:
- Waypoint navigation
- Task sequencing
- Behavior-based autonomy
AI Features:
- Object detection and tracking
- Terrain classification
- Semantic mapping
- Mission optimization
Power System
Battery:
- Type: Li-ion battery pack
- Voltage: 22.2V
- Capacity: 20Ah
- Hot-swappable design
Power Management:
- Smart power distribution
- Low-power modes
- Dynamic power allocation
Runtime:
- Standard Operation:4 hours
- Heavy Usage: 3 hours
- Standby: 24 hours
Communication
Primary:
- Wi-Fi 6E
- Range: Up to 1 km line of sight
Secondary:
- Long-range radio (optional)
- 4G/5G cellular (optional)
- Satellite communication (optional)
Protocol Support:
- Encrypted data transmission
- Low-latency control
- Video streaming optimization
Environmental Specifications
Operating Environment:
- Temperature: -20°C to 50°C
Storage Environment:
- Temperature: -40°C to 60°C
Software Features
Development Environment:
- ROS 2 integration
- Python and C++ APIs
- MATLAB / Simulink
- Simulation environment
- UNITY
AI Capabilities:
- Terrain classification
- Object recognition
- Autonomous mission planning
- Others
User Interface:
- Web-based control interface
- Mission planning software
- Data visualization tools
- Virtual reality operator interface
Control Interface
Primary Controller:
- Rugged tablet with touchscreen
- Custom control application
- Real-time video feeds
Alternative Controls:
- Laptop-based interface
- Virtual reality interface (optional)
Safety Features
Mechanical Safety:
- Emergency stop buttons
- Mechanical brake system
- Current limiting
Operational Safety:
- Collision prevention
- Stability monitoring
- Safe mode triggers
- Remote kill switch
Additional Features
Modular Design:
- Quick-release panels
- Interchangeable components
- Field-serviceable parts
Transport:
- Lifting points
- Tie-down points
- Compact transport mode
Accessories:
- Transport case
- Field repair kit
- Battery charging station
- Spare parts kit
Applications
Primary Uses:
- Urban search and rescue
- Hazardous material handling
- Military reconnaissance
- Industrial inspection
Secondary Uses:
- Research and development
- Training and simulation
- Competition robotics
- Educational demonstrations
|